Reactive Base Control for On-The-Move Mobile Manipulation in Dynamic Environments
We present a reactive base control method that enables high performance mobile manipulation on-the-move in environments with static and dynamic obstacles. We demonstrate the systems performane in numerous real-world and simulated environments where other robots in the workspace present dynamic obstacles.
Video

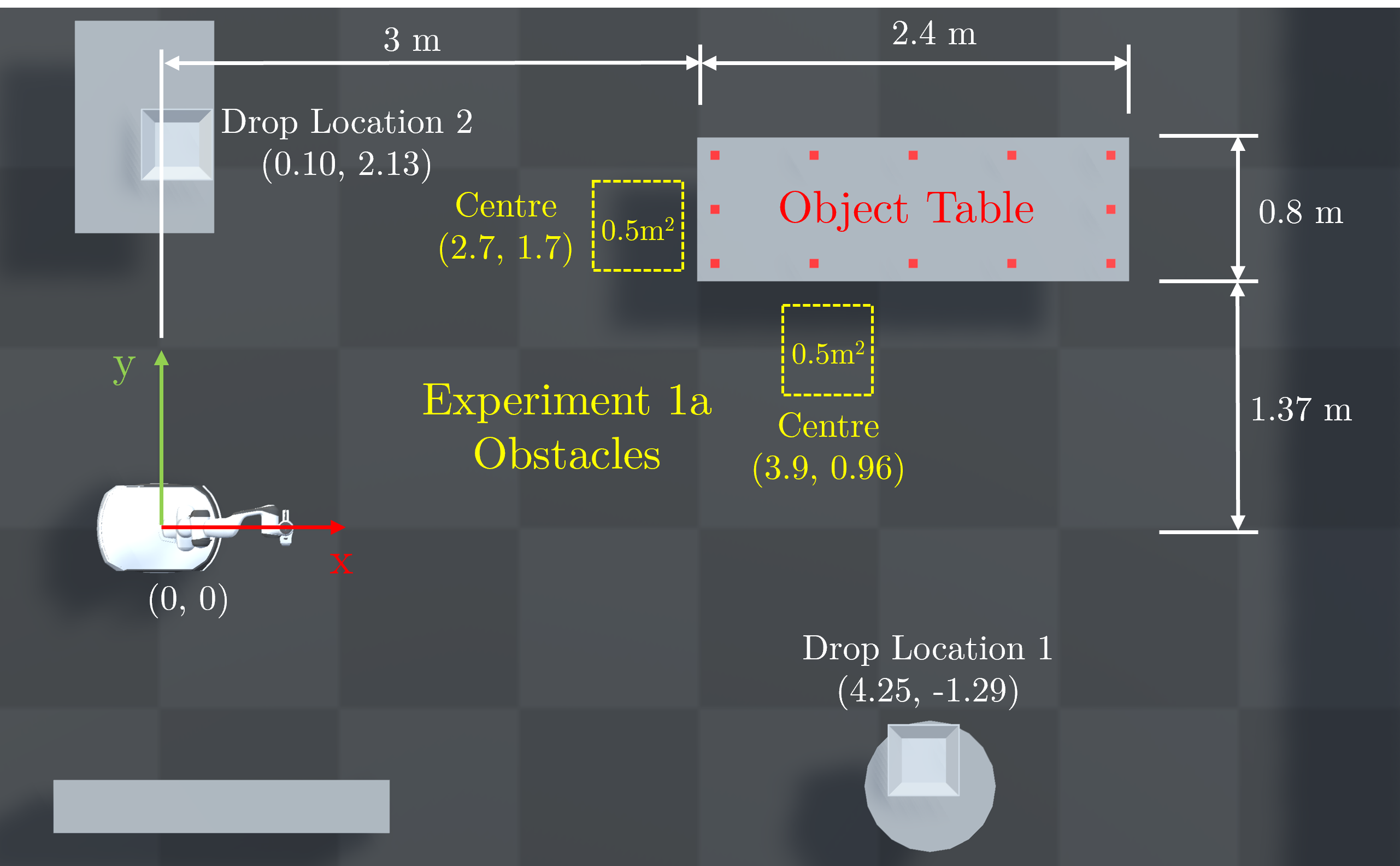
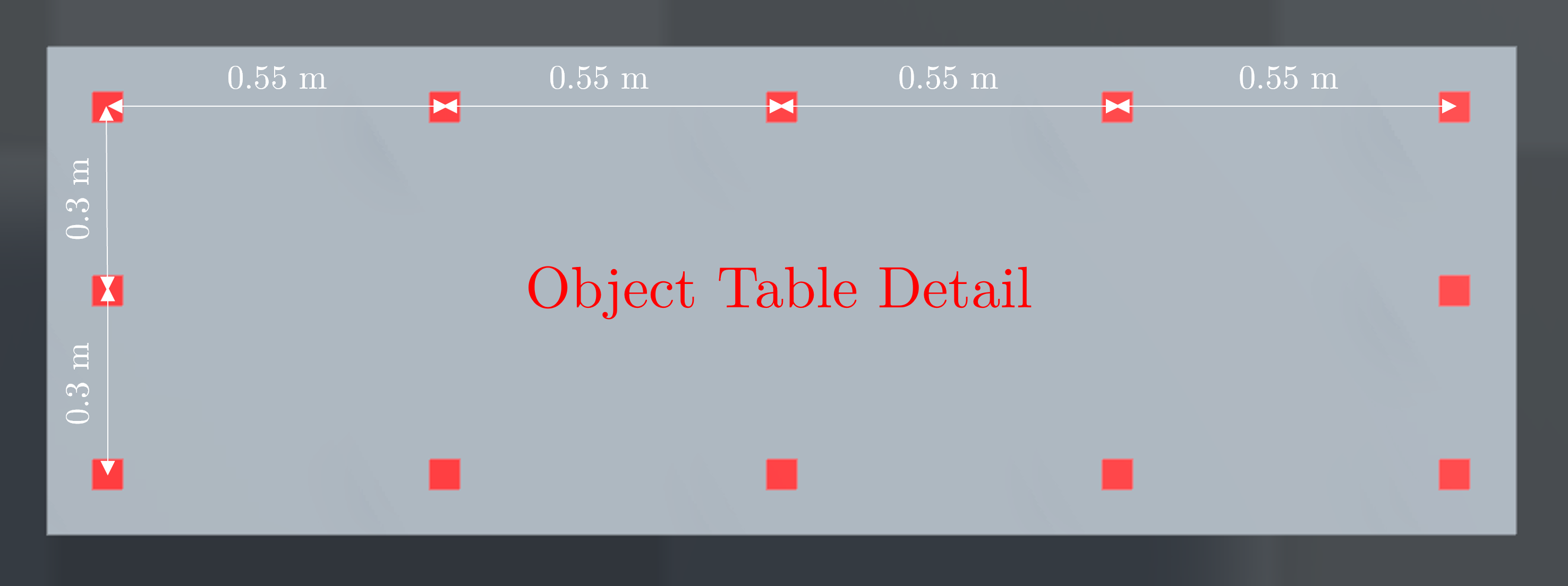
Experiment Layout
The figures below illustrate the dimensions of the real-world and simulated experimental arrangement.
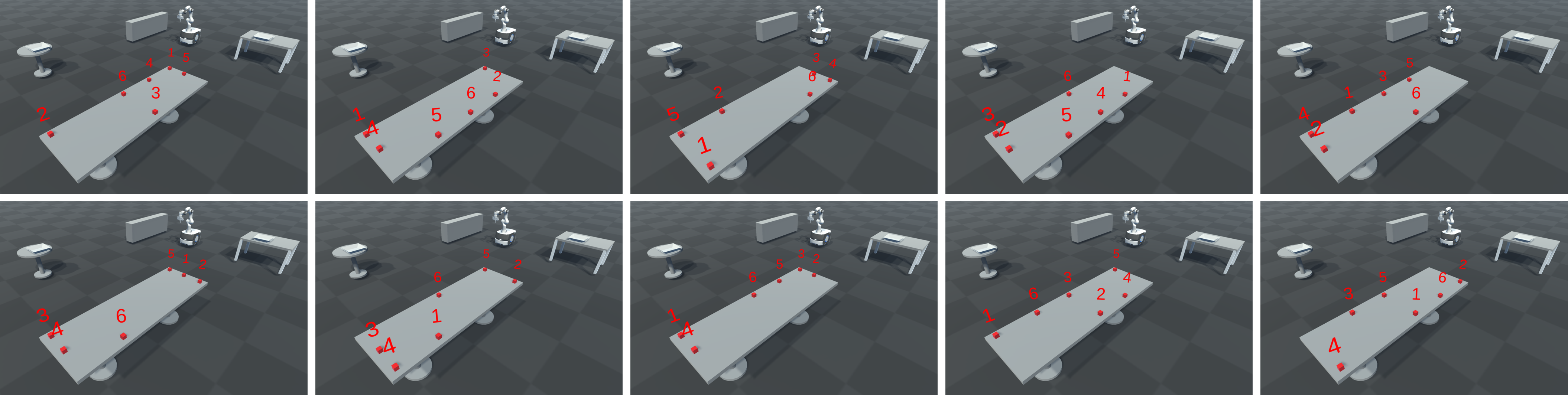
The images below show the location and order of the objects for each of the 10 real world trials.